STIM
Support Hub for Safran STIM IMUs and MEMS Gyros
Product Documents
FAQ
-
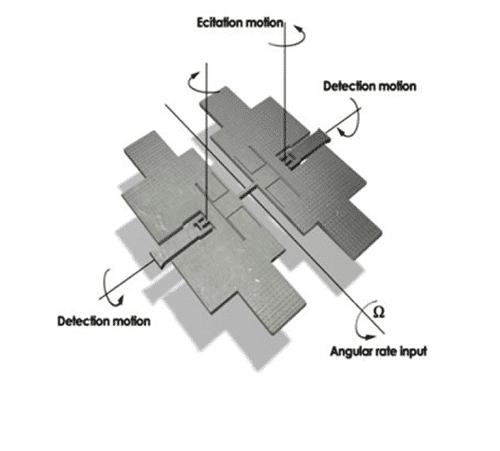
What is the principle of operation for gyros?
-
Are the STIM products available without housing?
-
Can STIM products be repaired?
-
Is a Certificate of Compliance (CoC) available for the STIM products?
-
Is it possible to update STIM micro controller firmware?
-
Are the STIM products continuously temperature compensated?
-
What is the “Time to valid data” for STIM products?
-
What are the functional differences from STIM202 to other STIM gyro products?
-
How is bias instability measured?
-
How is Angle Random Walk (ARW) defined?
-
What type of low pass filters are used for STIM?
-
What is group delay?
-
What is the TOV signal of STIM products?
-
Can the STIM products output roll pitch and yaw in degrees?
-
What is the definition of Integrated angle?
-
What is the definition of Incremental angle?
-
What is the accuracy of a position change measurement using STIM IMUs?
-
What is the resolution for the different accelerometer input ranges available for STIM300?
-
STIM Evaluation kit: The indicator for “Data arriving from device” light is green but there is no output from the STIM.
-
How to solve evaluation kit (EVK) error message “Unable to control supply voltage”?
-
Do you have any example code for communicating with the STIM?
-
What is the CRC?
Log Support Ticket
