Advanced Hardware-in-the-Loop (HIL) FAQ
Other
Answer: Hardware-in-the-Loop (HIL) simulation is a technique that is used for testing navigation systems where the vehicle trajectory is not know in advance. In such a scenario, the vehicle trajectory is fed to the GNSS simulator in real-time. HIL can be used in the development and testing of complex real-time systems such as satellite control systems, military tactical missiles, aircraft flight control and automotive systems.
A HIL setup involving the Skydel GNSS simulator will allows you to send a true vehicle trajectory to Skydel in real-time and generates the corresponding GNSS RF signal:
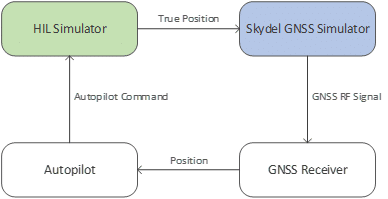
The image above is depicting a closed loop where the true position is propagated into the system and where the autopilot applies commands to affect the trajectory in real-time. The added latency caused by the HIL Simulator and the Skydel GNSS Simulator in the system must be small enough to not negatively impact the test and measurements of the Autopilot and GNSS Receiver performance.
Please see user Manual:
> Orolia Skydel User Manual
Answer: The best way to check the HIL simulation performance level when using Skydel will be to use the performance graph and HIL graph. These are powerful visualization tools designed to help you verify if your HIL solution is working exactly as expected.
For more information on this feature, please consult the following links:
> Orolia Skydel User Manual – HIL Performance Graph
> Skydel Real Time Performance Tutorial Video
Answer: With the release of Skydel version 22.5 (as of June 1, 2022) the HIL Latency can be reduced to 10ms. Using timestamp and a common clock source, the latency is perfectly deterministic. The Skydel Performance and HIL tab are good diagnostic tools for optimizing the latency on any hardware (GSG-8 or your own custom hardware).
Answer: To integrate a Skydel Simulator into a HIL environment, you will probably need the following elements:
- A distributed clock reference such as the SecureSync to ensure the operating system on the HIL Simulator, and the Skydel Simulator are tightly synchronized within hundreds of microseconds using the PPS and 10MHz
- Linux OS: Linux is recommended over Windows for real-time applications. Linux should be configured to use Precision Time Protocol (PTP) to synchronize the clock with the SecureSync.
- Skydel HIL Client: It’s a library providing a simple API. The Skydel HIL Client requires an Ethernet connection and uses a mix of TCP/IP for most commands and UDP for true position data.
- GSG-8 or an equivalent custom hardware to run Skydel. The GSG-8 comes pre-configured with Linux for optimal performance.
Please see user manual:
> Orolia Skydel User Manual
Answer: Skydel uses advanced technics to leverage the processing power of the CPU(s) and GPU(s). The cost is a small latency of few milliseconds called the Engine Latency. The other source of latency results from the rate at which the HIL simulator sends receiver trajectory samples and the network latency itself, when the HIL simulator is running on a separate computer, which is recommended. To compensate for the cumulated latency sources, Skydel extrapolates the position in the future by a few milliseconds. The rule of thumb for Skydel is to extrapolate in the future using a time offset. The time offset is the sum of the engine latency, HIL sample interval and the network latency. The time offset is represented by the Tjoin parameter in Skydel and is configured by the user.
Answer: Yes. Instead of feeding the Skydel simulator with the current position in real-time, you can provide positions in the future so that Skydel will interpolate between the samples.
Answer: Yes. The optional software license can be enabled for a very reasonable price.
Answer: Skydel is the most innovative GNSS & PNT test solution in the market. It has very low latency and does not require expensive add-ons. Most important is the efficient setup time achieved by built-in testing capabilities that quickly identify issues and verify optimized performance. The HIL graph is a revolutionary tool that provides insight into the integration of the HIL sub systems and lets you find issues that are unquantified and unaccounted for in solutions from other vendors.
Answer:
- The acceptable latency added with the addition of a HIL and GNSS simulators
- The HIL Simulator position update rate
- The HIL setup clock source
- The available data (time, position, velocity, attitude, angular velocity, etc.)
Answer:
- Zero effective latency: Skydel extrapolates the position to compensate the effect of the latency
- Extrapolation using velocity and acceleration
- Reduction of latency to 10ms
- New graphs showing the system performance