# White Papers
Creating a GNSS Test Plan

Introduction
GPS/GNSS signals are everywhere. The low cost and high performance of GNSS receiver chipsets makes it easier than ever to include a GNSS receiver in products that never had them before. With the availability of multiple GNSS constellations that transmit signals on multiple frequencies, and various available technologies to improve the accuracy of GNSS, evaluating and selecting a receiver as well as coming up with a gnss test plan can be a significant undertaking. A great deal of time and
effort usually goes into receiver selection, and then there is the engineering effort required to integrate the receiver into the final product.
Systems integrators may think that their receivers were already tested by the manufacturer and that there was no need to test again in the final product. However, this would not be an accurate assessment.
How the receiver is integrated can have a major impact on product performance. The placement of the antenna and associated components is also important, if the antenna is integrated into the product.
Ensuring that the system is not generating noise that interferes with GNSS reception is another key reason to test. Testing in the environment and under the conditions in which the product must operate are a major part of product development, and these should not be overlooked.
The best method to perform this testing is by using a GNSS simulator. A GNSS simulator allows for repeatable testing of devices with GNSS receivers in simulated environments.
Before any testing can begin, it is important to put together a test plan. The test plan development ensures that you are testing what needs to be tested for any given application. This white paper provides guidance and considerations to help you develop a test plan to test devices with GNSS receivers in them.
GNSS Test Plan
There is a basic set of GNSS tests that are defined and well-accepted as key performance tests for GNSS receivers. These tests include:
1. Time To First Fix (TTFF)
This is the amount of time, normally measured in seconds, that the receiver takes to report the date, time, and position (known as a fix) that it calculates. The time is measured from the time the receiver is reset until the receiver reports a fix. There are three different types of resets that can be performed on any receiver. These are known as cold, warm, and hot starts.
When a cold start is performed, the receiver memory is cleared, and the receiver must perform calculations without using any saved information. Data about the satellite constellation (almanac), precise orbit and clock data from each satellite (ephemeris), and the date, time, and location are deleted. A cold reset on a receiver is not typically performed by powering off the device; usually a separate command needs to be sent to the receiver to do a cold reset. The time to first fix is longest with a cold reset.
A warm reset is often performed by powering down and then powering a device back on. A warm reset keeps the almanac information in memory and deletes the ephemeris and the date, time, and location information. This allows the receiver to get a fix faster than it would with a cold reset.
When GNSS reception is temporarily interrupted (driving through a tunnel, for example) and then reception starts again, this is called a hot reset. The receiver keeps all the stored information (almanac, ephemeris, date/time, position) and the receiver can get a fix again very quickly.
This test is important for applications where the user must get the position or time information as quickly as possible. For example, it is important for GNSS receivers used in automobiles for dashboard navigation because the user needs to rely on directions, which cannot be provided until a fix is obtained. A longer TTFF is not as important for a timing receiver in a stationary application, where the device is always running and startup time really only applies during installation or maintenance.
2. Position Accuracy

Position accuracy is measured by comparing the truth data from the GNSS simulator to the position reported by the receiver. Position accuracy is measured under different motion profiles and/or at different locations.
Position accuracy tests normally include running a test over a period of time and collecting the position errors at an interval (example: run a test for one hour and
collect measurements every second). The simulator may be able to perform the accuracy tests in real-time; otherwise, the statistical analysis can be completed as a
post-processing step.
Examples of places to test include the northern or southern hemisphere, the crossing between hemispheres and the north pole. The places selected for testing are based on the product and its application.
3. Timing Accuracy
Timing accuracy tests are performed by comparing the 1 pulse per second signal (1PPS) from the GNSS simulator to the 1PPS signal generated by the receiver under test. Using a time interval counter or an oscilloscope, it is possible to determine the timing accuracy of the receiver. Like position accuracy tests, the measurements are collected over a period of time, every second.
Timing accuracy tests are important when the application is for accurate timing. If the application is for position and navigation, timing accuracy tests may not be necessary.
4. Sensitivity
Receiver sensitivity is the lowest power level that the GNSS signals can have for the GNSS receiver to be able to lock onto them and continue tracking. There are two important types of sensitivity: acquisition and tracking.
Acquisition sensitivity is the power level that the GNSS signal needs to have for a receiver to lock onto it for the first time. Tracking sensitivity is the power level needed for the receiver to keep tracking the signals after acquisition. Acquisition of the signals requires a higher power level than the level needed to maintain tracking. These tests are important during product development because the product design itself has the potential to interfere with GNSS reception.
These tests can be performed on a device with no impairments or errors added, to provide a good baseline of how the device will operate in ideal conditions. The tests performed will be selected based on the application.
5. GNSS Errors and Impairments
There are naturally occurring and man-made conditions in a live environment that have an impact on the results of these basic tests. It is important to test the device or product in the environment that the device is expected to operate in. Without these additional tests, a GNSS product may operate well in ideal environments but not operate well at all in real-world environments.
The key things that add error and affect performance of the GNSS receiver or interfere with the ability of the receiver to get a fix are the ionosphere, the troposphere, multipath, local RF interference, and limited sky views. The GNSS system itself may also have errors, such as incorrect ephemeris data or corrupted messages.
As the GNSS signal travels from the satellite to a receiver near or on earth, it travels through the ionosphere and troposphere. For a space vehicle, the signal may go through more of the ionosphere or none at all. Any simulator selected for testing should have the ability to change the atmospheric models and add errors into the ionosphere so the receiver equipment may be tested under different error conditions.
Multipath occurs when the signals from the satellite bounce off objects or the ground and cause multiple echoes of the main signal to arrive at the receiver. The receiver must discern which signals to use and which to reject. Multipath can occur in any environment, but the denser the buildings are, the more multipath will occur. Multipath can also occur when the signals reflect off the vehicle itself. This is often a concern with space vehicles. Whatever the environment is, nearly every application should be concerned with testing of multipath.
Local RF interference occurs when there is a transmitter nearby transmitting on a frequency that disrupts GNSS. It is necessarily the same as the GNSS frequency, it can be a harmonic or very strong out of band signal. The interference can be always present, present on a schedule, or randomly occurring. It is recommended to test the receiver performance for interference for any important application operating equipment on or near the earth.
The GNSS signals transmitted by the satellites contain a data stream with information on the constellation and each individual satellite. The data stream is called the navigation message. Receivers use this information to accurately calculate satellite positions in order to use them in obtaining a fix. If the data is incorrect, the calculation may also be incorrect. Any with any digital data, there is the chance of corruption. It is important that a receiver can reject corrupted and incorrect data messages, so the receiver does not use bad data. This test is normally performed by the receiver manufacturer, but if that cannot be confirmed, it may be necessary to add this type of test to the test plan.
There is also the threat of intentional degradation of an environment, such as jamming or spoofing. Jamming has the same effect on the receiver as RF interference, but since it is intended to disrupt a GNSS receiver it can have a bigger impact. The frequency and signal modulation used are specifically chosen to deny GNSS service within a local area. Spoofing is an attempt to fool a GNSS receiver into thinking it is in a different location by transmitting GNSS like signals to the receiver. Stationary timing applications and drones navigating autonomously are the most vulnerable to a GNSS spoofing attack. Any critical or autonomous application should be testing against intentional jamming and spoofing.
Test Development Considerations
Constellations and Frequencies
There are now four GNSS systems available everywhere on earth. These systems are: GPS, GLONASS, Galileo, and Beidou. Although they are each managed by different governments in different parts of the world, the open service signals they transmit are usable by everyone, everywhere. There are also two regional navigation systems providing service to India (NavIC) and Japan (QZSS). With four constellations, the number of combinations possible is 24. And that is not considering the different signal types and frequencies.
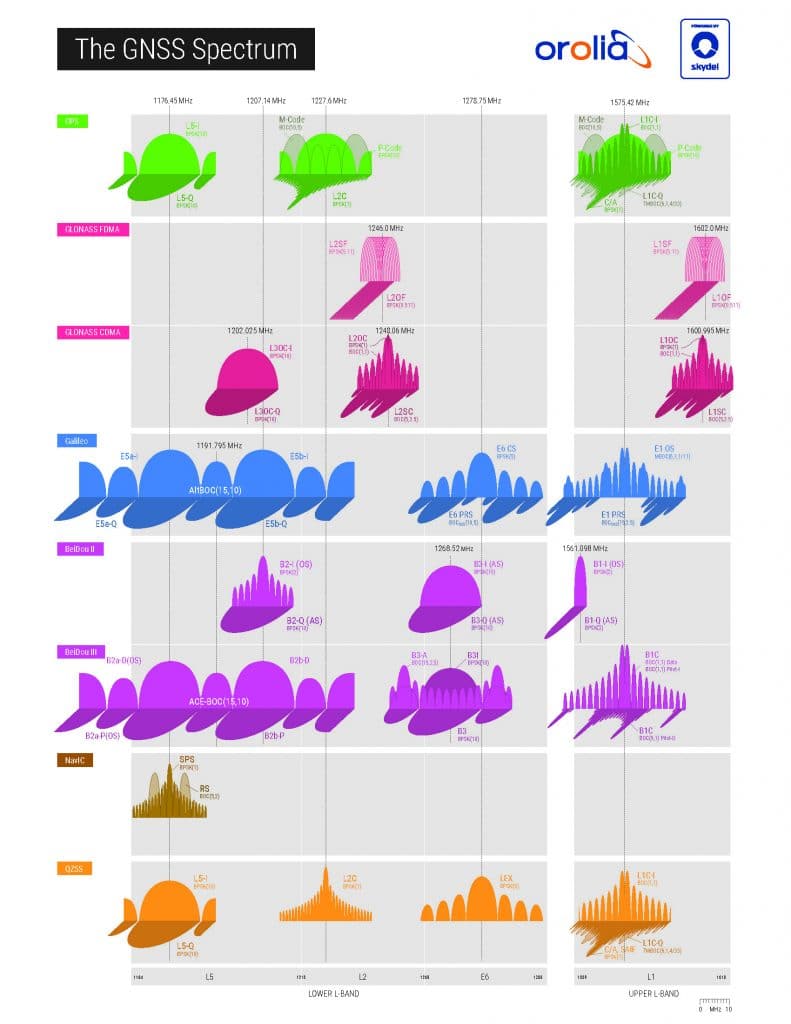
Each of these constellations transmits multiple signal types on multiple frequencies. If we consider that each constellation transmits (on average) three different frequencies, it significantly increases the number of possible combinations to test.
This GNSS spectrum poster shows the different constellations and signal types transmitted by the GNSS satellites.
With all these possibilities, it can be overwhelming to decide what to test and in which combinations.
Considerations
Here are some factors to consider when deciding which constellations to test, which tests to perform and which impairment or error conditions to test under.
- How critical is the application?
Applications intended for safety of life operations have their own test specifications that should be followed. For use cases that do not have industry standards but are considered critical (telecommunications timing, for example), it is important to test in all operating conditions. For something like a fitness device, it is not critical if the device must operate in a different mode due to interference or availability and the result is slightly less accurate.
- How will the additional constellations be used in the product?
In many consumer devices, the additional constellations are used to increase the availability of satellites. In this case, there is not a lot of value in testing different combinations of constellations. Normally, all the constellations that will be used can be tested together. To determine whether the receiver will operate in low availability conditions, the number of satellites can be reduced rather than removing an individual constellation or signal.
However, if a product will operate in a military setting, it is important to test to make certain that constellations and/or frequencies can work alone.
- Is the primary application timing or position based?
It is generally not necessary to include timing accuracy tests when the 1PPS signal is not used in the application. Likewise, it is generally not necessary to test position accuracy under different conditions when the primary application is timing.
- What is the primary operating environment?
GNSS receivers are used on the ground, in the air and in space. Examples of ground devices include mobile or wearable devices, road vehicles, rail vehicles, critical infrastructure timing devices, and stationary survey and base station equipment. For ground equipment, the main considerations are satellite availability and multipath performance for position accuracy. Repeated, terrestrial interference can also be important depending on how critical the application is.
Devices used in the air include drones, aircraft and balloons. Low-flying drones or aircraft near the ground are subject to similar environments as ground-based equipment.
Devices in flight high above the earth are not as concerned with satellite availability or terrestrial interference. The multipath concerns change from signals bouncing off the ground or buildings to multipaths created by the vehicle itself. It is also important to consider motion using six degrees of freedom (6DOF), which includes the typical three potions variables (X, Y, Z) plus pitch, roll, and yaw. Tests should only be designed for the environments where the product will operate.
The following table illustrates some typical test environment considerations for various applications. It is a representative guide to aid in test development, but it is not all-inclusive.
| Positioning | Navigation | Dynamics | Multiple Concerns | Availability Concerns | Interference Concerns | Atmospheric Concerns | Jamming Spoofing | |
|---|---|---|---|---|---|---|---|---|
| Wearables | Yes | Pedestrian | No | Yes | No | No | No | |
| Drones | 6DOF | Yes | Yes | Yes | No | Yes | ||
| Telecom Infrastructure | Yes | Yes | None | Yes | No | Yes | No | Yes |
| Automotive | Yes | Yes | 2D/3D | Yes | Yes | Yes | Yes | Yes |
| Survey/Professional | Yes | Mobile | Yes | Yes | Yes | Yes | Yes | |
| Airborne | Yes | 6DOF | Yes | No | Yes | Yes | Yes | |
| Space | Yes | 6DOF | Yes | No | No | Yes | No |
Summary
GPS/GNSS signals are widely available, inexpensive to use and very complex. Although it is essential to test the GNSS functionality of any product in development, doing so can be a daunting task when you look at all the possible combinations of GNSS constellations and signals and all the things that can add errors to GNSS solutions. This white paper should help make those tasks a bit easier and provide some key considerations for preparing a test plan for GNSS receivers that are integrated into other products.
By looking at the application and operating environment, it is possible to determine the most important things to test for. After the overall test plan outline is created, it is easily translated into requirements for selecting a GNSS simulator. Orolia offers essential and advanced simulation tools to cover every test case. Orolia also offers services to help prepare a test plan, perform testing and consulting to assist in making any GNSS equipment more robust when operating in any environment.