
Building a Resilient System? 5 Key Steps to Follow

Selecting the best solution for military applications might seem complicated, but answering a few key questions can help define requirements. The most important objective is to ensure that trusted, accurate data is available to warfighters so they can have confidence making decisions and can continue operations, even in contested or GPS denied environments.
- Determine the Application
Air, land or sea? Static or mobile? In which operating environment will the solution be used? Is it timing-based only, or is positioning and/or navigation involved as well? Each domain has its unique set of requirements, including factors such as vibration profiles, SWaP (size, weight and power) limitations, ruggedization parameters and the level of GPS jamming and spoofing tolerance required. The more defined the application, the more specific the requirements- resulting in a solution that performs well and isn’t over-engineered. - Which Outputs Are Needed?
Understanding output requirements is an important step in defining the most effective solutions for each application. For example, if outputs such as IRIG, NTP, PTP, PPS, 10 mHz are needed, then a timing solution is sufficient. If, however, orientation, velocity, roll/pitch/yaw are involved, then a positioning and navigation solution is also required with an IMU or INS, such as Safran’s VersaPNT, which offers sensor fusion with its Flexfusion engine. This includes a tightly coupled GNSS+INS in a small SWaP system, and it maintains integrated, trusted and accurate data even in a hostile environment.Other key questions to consider:- What are the requirements for holdover when signals are unavailable?
- What are acceptable drift rates?
- What is the level of accuracy required?
- Determine the Level of Tolerance: The Resilient Bridge
The illustration below shows some of the variables that can occur from the time of a disruption – or, the loss of a GPS signal – until signal integrity is restored based on the type of IMU used and the availability of sensors or alternative signals.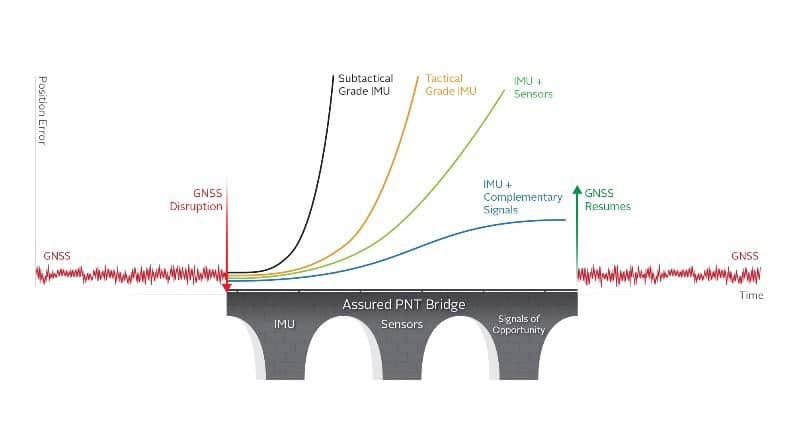
Many variables factor into building a bridge of data. For example, how long can a system operate without a GNSS signal or the level of positioning accuracy needed to maintain an adequate level of situational awareness?
Consider the IMU. Even the most accurate IMU has some drift. Without GNSS present, that drift will continue and increase significantly. How drift is addressed and how the signal is augmented depends on very specific requirements. If high accuracy is needed for a short period, a sub-tactical grade IMU can be used. If high accuracy is required for a longer period, then a tactical grade IMU may be needed. Add sensors like an odometer to get data for a longer period. An IMU coupled with a complementary signal provides the longest protection.
- Build in Interference Detection
GPS signal interference is widely understood as the disruption of a GPS/GNSS signal, whether from unintentional environmental factors or intentional jamming and spoofing from adversarial threats. Any interference in the continuity of the GPS signal can have dire effects on military operations, yet commanders often are not even aware that they have lost GPS signal integrity. Interference detection and warning systems automate the process of monitoring the GPS feed into receivers and the downstream subsystems relying on data. These solutions even have automatic holdover protocols that can switch to alternative sources of data when GPS is not available or reliable. - Augment Your System
Combining data from multiple sensors (sensor fusion with Kalman filters for example) is an excellent way to augment a reliant system. It corrects for the shortcomings of individual sensors in calculating accurate positioning and orientation. Sensor fusion combines multiple signals of opportunity to develop the optimal positioning data. These signals might include GNSS, alternative signals, LIDAR, Radar, Pseudolites, MEMS sensors, cameras, and more.
When considering a Resilient system, keep in mind that the ultimate goal is to ensure battlefield readiness, protect warfighters and stay ahead of the enemy.